Расчет мощности при висении на статическом потолке:
Удельная мощность , потребная для привода несущего винта в режиме висения на статистическом потолке, рассчитывается по формуле:
 ,
,
где NHст - потребная мощность, Вт;
m0 - взлетная масса, кг;
g - ускорение свободного падения, м/с2;
p - удельная нагрузка на ометаемую несущим винтом площадь, Н/м2;
Dст - относительная плотность воздуха на высоте статического потолка;
h0 - относительный к.п.д. несущего винта на режиме висения (h0=0.75);
Относительное увеличение тяги несущего винта для уравновешивания аэродинамического сопротивления фюзеляжа и горизонтального оперения :
![]() .
.
Выбор подшипников и расчёт подшипников на долговечность
Подшипники трансмиссии работают при переменной частоте вращения, которая зависит не только от изменения частоты вращения двигателя, но и от номера включенной передачи, а также при переменных нагрузках, которые зависят от величины крутящего момента развиваемого двигателем, номера включенной передачи и вала, на котором они находятся. Все э...
Расчет эксплуатационных расходов
План эксплуатационных расходов определяет денежные средства необходимые для выполнения заданного объема работы станции. В зависимости от отношения к производственному процессу расходы делятся на непосредственно вызываемые этим процессом и общехозяйственные, т.е. расходы по обслуживанию производства и управления. В свою очередь, расходы н...
Местная прочность судна
Способность судна воспринимать действующие на него внешние силы без разрушения. Различают общую и местную П.С. Нарушение общей П.С. приводит к разрушению корпуса и, как правило, к гибели судна, местной П.С.- к местным (локальным) повреждениям. При расчете общей П.С. корпус рассматривают как составную пустотелую балку переменного сечения, ...
Вертолет - это винтокрылая машина, в которой подъемную силу и силу тяги создает винт. Несущий винт служит для поддержания и перемещения вертолета в воздухе. При вращении в горизонтальной плоскости несущий винт создает тягу(Т) направленную вверх, выполняет роль подъёмной силы(Y). Когда тяга несущего винта будет больше веса вертолета(G), вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги несущего винта вертолет будет неподвижно висеть в воздухе. Для вертикального снижения достаточно тягу несущего винта сделать несколько меньше веса вертолета. Поступательное движение вертолета(P) обеспечивается наклоном плоскости вращения несущего винта при помощи системы управления винтом. Наклон плоскости вращения винта вызывает соответствующий наклон полной аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная — вызывать поступательное перемещение вертолета в соответствующем направлении.
Рис 1. Схема распределения сил
Конструкция вертолета
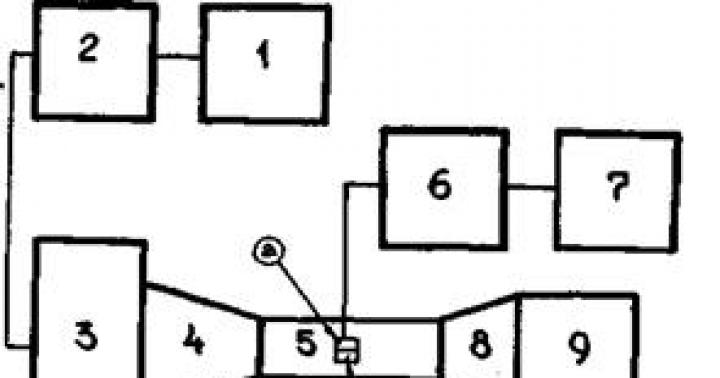
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудования. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения несущего винта,и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки несущего винта (МИ-24)).Силовая установка(двигатели) является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.). Несущий винт(НВ) служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей и втулки несущего винта. Рулевой винт служит для уравновешивания реактивного момента, возникающего при вращении несущего винта, и для путевого управления вертолетом. Сила тяги рулевого винта создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент несущего винта. Для разворота вертолёта достаточно изменить величину тяги рулевого винта. Рулевой винт так же состоит из лопастей и втулки. Управление несущим винтом производится при помощи специального устройства, называемого автоматом перекоса. Управление рулевым винтом производится от педалей. Взлетно-посадочные устройства служат опорой вертолета при стоянке и обеспечивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж

Рис.2 Основные части вертолета:
1 — фюзеляж; 2 — авиадвигатели; 3 — несущий винт (несущая система); 4 — трансмиссия; 5 — хвостовой винт; 6 — концевая балка; 7 — стабилизатор; 8 — хвостовая балка; 9 — шасси
Принцип создания подъемной силы винтом и система управления винтом
При вертикальном полете п олная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на скорость уходящей струи:

где πD 2 /4 - площадь поверхности, ометаемой несущим винтом; V— скорость полета в м/сек; ρ — плотность воздуха; u — скорость уходящей струи в м/сек.
По сути сила тяги винта равна силе реакции при ускорении воздушного потока
Для того чтобы вертолет двигался поступательно, нужен перекос плоскости вращения винта, причем изменение плоскости вращения достигается не наклоном втулки несущего винта (хотя визуальный эффект может быть именно такой), а изменением положения лопасти в разных частях квандрантов описываемой окружности.
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг - это360º . Тогда примем заднее положение лопасти за0º и далее через каждые90º полный оборот. Так вот лопасть в интервале от0º до180º - это лопастьнаступающая , а от180º до 360º -отступающая . Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила.

Рис.3 Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает». В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явныйпереворачивающий момент . При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены вовтулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов:горизонтальные, вертикальные и осевые.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне .

Рис. 4 Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
От0º до90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх (специалисты говорят «делаетвзмах »). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шар-нир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. ЗдесьУ - это подъемная сила,Х - сила сопротивления,Vy - вертикальное движение воздуха,α - угол атаки.)

Рис.5 Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку180º . Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще исилы инерции .
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тягавтомата перекоса вертолета . Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки0º , опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы «машут » или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в10 раз , а центробежная - в100 раз . Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и естьплоскость вращения винта (см рис1.)
Для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении180º должна опуститься, а в положении0º (360º) должна подняться. То есть в точке180º подъемная сила должна уменьшиться, а в точке0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке180º и увеличив его в точке0º (360º) . Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно,циклично .Он так и называется циклический угол установки лопасти (циклический шаг винта ). Я выделяю это название потому, что существует еще иобщий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия выполняетавтомат перекоса вертолета . Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз), акрен , соответственно, относительно его продольной оси (наклон влево-вправо).
Конструктивноавтомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же.

Рис. 6 Автомат перекоса модели вертолета
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги6 . Эти тяги соединены с так называемой внутренней тарелкой2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору3 . При изменении своего наклона (углового положения) она воздействует на тяги6 , которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого - этовнешняя тарелка винта1 . Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа4 и по каналу крена5 . Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении.
Общий шаг винта меняется перемещением по оси винта внутренней тарелки2 при помощи механизма7 . В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса.

Рис. 7 Втулка винта с автоматом перекоса (схема).

Рис. 8 Поворот лопасти в вертикальном шарнире втулки несущего винта.

Рис. 9 Втулка несущего винта вертолета МИ-8
Введение
Проектирование вертолета представляет собой сложный, развивающийся во времени процесс, разделяющийся на взаимосвязанные проектные стадии и этапы. Создаваемый летательный аппарат должен удовлетворять техническим требованиям и соответствовать технико-экономическим характеристикам, указанным в техническом задании на проектирование. Техническое задание содержит исходное описание вертолета и его летно-технические характеристики, обеспечивающие высокую экономическую эффективность и конкурентоспособность, проектируемой машины, а именно: грузоподъемность, скорость полета, дальность, статический и динамический потолок, ресурс, долговечность и стоимость.
Техническое задание уточняется на стадии предпроектных исследований, в ходе которых выполняются патентный поиск, анализ существующих технических решений, научно-исследовательские и опытно-конструкторские работы. Основной задачей пред проектных исследований является поиск и экспериментальная проверка новых принципов функционирования проектируемого объекта и его элементов.
На стадии эскизного проектирования выбирается аэродинамическая схема, формируется облик вертолета и выполняется расчет основных параметров, обеспечивающих достижение заданных летно-технических характеристик. К таким параметрам относятся: масса вертолета, мощность двигательной установки, размеры несущего и рулевого винтов, масса топлива, масса приборного и специального оборудования. Результаты расчетов используются при разработке компоновочной схемы вертолета и составлении центровочной ведомости для определения положения центра масс.
Конструирование отдельных агрегатов и узлов вертолета с учетом выбранных технических решений выполняется на стадии разработки технического проекта. При этом параметры спроектированных агрегатов должны удовлетворять значениям, соответствующим эскизному проекту. Часть параметров может быть уточнена с целью оптимизации конструкции. При техническом проектировании выполняется аэродинамические прочностные и кинематические расчеты узлов, выбор конструкционных материалов и конструктивных схем.
На стадии рабочего проекта выполняется оформление рабочих и сборочных чертежей вертолета, спецификаций, комплектовочных ведомостей и другой технической документации в соответствии с принятыми стандартами
В данной работе представлена методика расчета параметров вертолета на стадии эскизного проектирования, которая используется для выполнения курсового проекта по дисциплине "Проектирование вертолетов".
1. Расчет взлетной массы вертолета первого приближения
2. Расчет параметров несущего винта вертолета
2.1Радиус R , м, несущего винта вертолёта одновинтовой схемы рассчитывается по формуле:
 ,
- взлетная масса вертолета, кг;
,
- взлетная масса вертолета, кг;
g - ускорение свободного падения, равное 9.81 м/с 2 ;
p - удельная нагрузка на площадь, ометаемую несущим винтом,
p =3,14.
Значение удельной нагрузки p на ометаемую винтом площадь выбирается по рекомендациям, представленным в работе /1/: где p = 280
Принимаем радиус несущего винта равным R = 7.9
Угловая скорость w , с -1 , вращения несущего винта ограничена величиной окружной скорости w R концов лопастей, которая зависит от взлетной массы
вертолета и составили w R = 232 м/с.2.2 Относительные плотности воздуха на статическом и динамическом потолках

2.3 Расчет экономической скорости у земли и на динамическом потолке
Определяется относительная площадь
эквивалентной вредной пластинки: , где S э = 2.5Рассчитывается значение экономической скорости у землиV з , км/час:
 ,
,
где I
км/час.Рассчитывается значение экономической скорости на динамическом потолкеV дин , км/час:
 ,
,
где I = 1,09…1,10- коэффициент индукции.
км/час.2.4Рассчитываются относительные значения максимальной и экономической на динамическом потолкескоростей горизонтального полета:
где V max =250 км/час и V дин =182.298 км/час - скорости полета;
w R =232 м/с - окружная скорость лопастей.
2.5Расчет допускаемых отношений коэффицента тяги к заполнению несущего винта для максимальной скорости у земли и для экономической скорости на динамическом потолке:
припри2.6 Коэффициенты тяги несущего винта у земли и на динамическом потолке:
2.7 Расчет заполнения несущего винта:
Заполнение несущего винта s рассчитывается для случаев полета на максимальной и экономической скоростях:
 ;
;  .
. В качестве расчетной величины заполнения s несущего винта принимается наибольшее значение из s Vmax и s V дин .
0Курсовая работа по проектированию
Легкий вертолет
1 Разработка тактико-технических требований. 2
2 Расчет параметров вертолета. 6
2.1 Расчет массы полезного груза. 6
2.2 Расчет параметров несущего винта вертолета. 6
2.3 Относительные плотности воздуха на статическом и динамическом потолках 8
2.4 Расчет экономической скорости у земли и на динамическом потолке. 8
2.5 Расчет относительных значении максимальной и экономической скоростей горизонтального полета на динамическом потолке. 10
2.6 Расчет допускаемых отношений коэффициента тяги к заполнению несущего винта для максимальной скорости у земли и для экономической скорости на динамическом потолке. 10
2.7 Расчет коэффициентов тяги несущего винта у земли и на динамическом потолке 11
2.8 Расчет заполнения несущего винта. 12
2.9 Определение относительного увеличения тяги несущего винта для компенсации аэродинамического сопротивления фюзеляжа и горизонтального оперения. 13
3 Расчет мощности двигательной установки вертолета. 13
3.1 Расчет мощности при висении на статическом потолке. 13
3.2 Расчет удельной мощности в горизонтальном полете на максимальной скорости. 14
3.3 Расчет удельной мощности в полете на динамическом потолке с экономической скоростью.. 15
3.4 Расчет удельной мощности в полете у земли на экономической скорости в случае отказа одного двигателя при взлете. 15
3.5 Расчет удельных приведенных мощностей для различных случаев полета 16
3.5.1 Расчет удельной приведенной мощности при висении на статическом потолке 16
3.5.2 Расчет удельной приведенной мощности в горизонтальном полете на максимальной скорости. 16
3.5.3 Расчет удельной приведенной мощности в полете на динамическом потолке с экономической скоростью.. 17
3.5.4 Расчет удельной приведенной мощности в полете у земли с экономической скоростью при отказе одного двигателя. 18
3.5.5 Расчет потребной мощности двигательной установки. 19
3.6 Выбор двигателей. 19
4 Расчет массы топлива. 20
4.1 Расчет крейсерской скорости второго приближения. 20
4.2 Расчет удельного расхода топлива. 22
4.3 Расчет массы топлива. 23
5 Определение массы узлов и агрегатов вертолета. 24
5.1 Расчет массы лопастей несущего винта. 24
5.2 Расчет массы втулки несущего винта. 24
5.3 Расчет массы системы бустерного управления. 25
5.4 Расчет массы системы ручного управления. 25
5.5 Расчет массы главного редуктора. 26
5.6 Расчет массы узлов привода рулевого винта. 27
5.7 Расчет массы и основных размеров рулевого винта. 30
5.8 Расчет массы двигательной установки вертолета. 32
5.9 Расчет массы фюзеляжа и оборудования вертолета. 32
5.10 Расчет взлетной массы вертолета второго приближения. 35
6 Описание компоновки вертолета. 36
Список литературы.. 39
1 Разработка тактико-технических требований
Проектируемый объект - легкий вертолет одновинтовой схемы с максимальной взлетной массой 3500 кг. Подбираем 3 прототипа таким образом, чтобы их максимальная взлетная масса находилась в пределах 2800-4375 кг. Прототипами являются легкие вертолеты: Ми-2, Eurocopter EC 145, Ансат.
В таблице 1.1 приведены их тактико-технические характеристики, необходимые для расчета.
Таблица 1.1- Тактико-технические характеристики прототипов
|
Вертолет |
|||
|
Диаметр несущего винта, м |
|||
|
Длина фюзеляжа, м |
|||
|
Масса пустого, кг |
|||
|
Дальность полета, км |
|||
|
Статический потолок, м |
|||
|
Динамический потолок, м |
|||
|
Максимальная скорость, км/ч |
|||
|
Крейсерская скорость, км/ч |
|||
|
Масса топлива, кг |
|||
|
Силовая установка |
2 ГТД Климов ГТД-350 |
2 ТВД Turbomeca |
Whitney РW-207K |
|
Мощность двигателей, кВт |
На рисунках 1.1, 1.2 и 1.3 изображены схемы прототипов.
Рисунок 1.1 - Схема вертолета Ми-2
Рисунок 1.2 - Схема вертолета Eurocopter EC 145
Рисунок 1.3 - Схема вертолета Ансат
Из тактико-технических характеристик и схем прототипов определяем средние значения величин и получаем исходные данные для проектирования вертолета.
Таблица 1.2 - Исходные данные для проектирования вертолета
|
Максимальная взлетная масса, кг |
|
|
Масса пустого, кг |
|
|
Максимальная скорость, км/ч |
|
|
Дальность полета, км |
|
|
Статический потолок, м |
|
|
Динамический потолок, м |
|
|
Крейсерская скорость, км/ч |
|
|
Количество лопастей несущего винта |
|
|
Количество лопастей рулевого винта |
|
|
Длина фюзеляжа, м |
|
|
Нагрузка на площадь ометаемой несущим винтом, H/м 2 |
2 Расчет параметров вертолета
2.1 Расчет массы полезного груза
Формула (2.1.1) для определения массы полезного груза:
где m мг - масса полезного груза, кг; m эк - масса экипажа, кг; L - дальность полета, км; m 01 - максимальная взлетная масса вертолета, кг.
Масса полезного груза:
2.2 Расчет параметров несущего винта вертолета
Радиус R , м, несущего винта вертолёта одновинтовой схемы рассчитывается по формуле (2.2.1):
, (2.2.1)
где m 01 - взлетная масса вертолета, кг; g - ускорение свободного падения, равное 9,81 м/с 2 ; p - удельная нагрузка на площадь, ометаемую несущим винтом, p = 3,14.
Принимаем радиус несущего винта равным R = 7,2 м.
Определяем величину окружной скорости w R концов лопастей из диаграммы изображенной на рисунке 3:
Рисунок 3 - Диаграмма зависимости концевой скорости лопасти от скорости полета для постоянных значений М 90 и μ
При V max = 258 км/ч w R = 220 м/с.
Определяем угловую скорость w , с -1 , и частоту вращения несущего винта по формулам (2.2.2) и (2.2.3):
2.3 Относительные плотности воздуха на статическом и динамическом потолках
Относительные плотности воздуха на статическом и динамическом потолках определяются по формулам (2.3.1) и (2.3.2) соответственно:
2.4 Расчет экономической скорости у земли и на динамическом потолке
Определяется относительная площадь S э эквивалентной вредной пластинки по формуле (2.4.1):
где S Э определяем по рисунку 4.
Рисунок 4 - Изменение площади эквивалентной вредной пластинки различных транспортных вертолетов
Принимаем S Э = 1,5
Рассчитывается значение экономической скорости у земли V з, км/час:
где I - коэффициент индукции:
I =1,02+0,0004V max = 1,02+0,0004258=1,1232 ,
Рассчитывается значение экономической скорости на динамическом потолке V дин, км/час:
2.5 Расчет относительных значении максимальной и экономической скоростей горизонтального полета на динамическом потолке
Расчет относительных значений максимальной и экономической скоростей горизонтального полета на динамическом потолке производится по формулам (2.5.1) и (2.5.2) соответственно:
; (2.5.1)
. (2.5.2)
2.6 Расчет допускаемых отношений коэффициента тяги к заполнению несущего винта для максимальной скорости у земли и для экономической скорости на динамическом потолке
Так как формула (2.6.1) для отношения допускаемого коэффициента тяги к заполнению несущего винта для максимальной скорости у земли имеет вид:
Формула (2.6.2) для отношения допускаемого коэффициента тяги к заполнению несущего винта для экономической скорости на динамическом потолке:
2.7 Расчет коэффициентов тяги несущего винта у земли и на динамическом потолке
Расчет коэффициентов тяги несущего винта у земли и на динамическом потолке производится по формулам (2.7.1) и (2.7.2) соответственно:
2.8 Расчет заполнения несущего винта
Заполнение несущего винта s рассчитывается для случаев полета на максимальной и экономической скоростях:
В качестве расчетной величины заполнения s несущего винта принимается значение из условия (2.8.3):
принимаем.
Длина хорды b и относительное удлинение l лопастей несущего винта будет равны:
2.9 Определение относительного увеличения тяги несущего винта для компенсации аэродинамического сопротивления фюзеляжа и горизонтального оперения
Относительное увеличение тяги несущего винта для компенсации аэродинамического сопротивления фюзеляжа и горизонтального оперения принимаем .
3 Расчет мощности двигательной установки вертолета
3.1 Расчет мощности при висении на статическом потолке
Удельная мощность, потребная для привода несущего винта в режиме висения на статистическом потолке, рассчитывается по формуле (3.1.1)
где N H ст - потребная мощность, Вт;
Дроссельная характеристика, которая зависит от высоты статического потолка и рассчитывается по формуле (3.1.2)
m 0 - взлетная масса, кг;
g - ускорение свободного падения, м/с 2 ;
p - удельная нагрузка на ометаемую несущим винтом площадь, Н/м 2 ;
D ст - относительная плотность воздуха на высоте статического потолка;
h 0 - относительный к.п.д. несущего винта на режиме висения (h 0 =0.75);
Относительное увеличение тяги несущего винта для уравновешивания аэродинамического сопротивления фюзеляжа:
3.2 Расчет удельной мощности в горизонтальном полете на максимальной скорости
Удельная мощность, потребная для привода несущего винта в горизонтальном полете на максимальной скорости, рассчитывается по формуле (3.2.1)
где - окружная скорость концов лопастей;
Относительная эквивалентная вредная пластинка;
Коэффициент индукции, определяемый по формуле (3.2.2)
3.3 Расчет удельной мощности в полете на динамическом потолке с экономической скоростью
Удельная мощность для привода несущего винта на динамическом потолке равна:
где - относительная плотность воздуха на динамическом потолке;
Экономическая скорость вертолета на динамическом потолке;
3.4 Расчет удельной мощности в полете у земли на экономической скорости в случае отказа одного двигателя при взлете
Удельная мощность, необходимая для продолжения взлета с экономической скоростью при отказе одного двигателя рассчитывается по формуле (3.4.1)
где - экономическая скорость у земли;
3.5 Расчет удельных приведенных мощностей для различных случаев полета
3.5.1 Расчет удельной приведенной мощности при висении на статическом потолке
Расчет удельной приведенной мощности при висении на статическом потолке производится по формуле (3.5.1.1)
где - удельная дроссельная характеристика:
x 0 - коэффициент использования мощности двигательной установки на режиме висения. Так как масса проектируемого вертолета составляем 3,5 тонн, ;
3.5.2 Расчет удельной приведенной мощности в горизонтальном полете на максимальной скорости
Расчет удельной приведенной мощности в горизонтальном полете на максимальной скорости производится по формуле (3.5.2.1)
где - коэффициент использования мощности на максимальной скорости полета,
Дроссельные характеристики двигателей, зависящие от скорости полета:
3.5.3 Расчет удельной приведенной мощности в полете на динамическом потолке с экономической скоростью
Расчет удельной приведенной мощности в полете на динамическом потолке с экономической скоростью проводится по формуле (3.5.3.1)
где - коэффициент использования мощности на экономической скорости полета,
и - степени дросселирования двигателей, зависящие от высоты динамического потолка H и скорости полета V дин в соответствии со следующими дроссельными характеристиками:
3.5.4 Расчет удельной приведенной мощности в полете у земли с экономической скоростью при отказе одного двигателя
Расчет удельной приведенной мощности в полете у земли с экономической скоростью при отказе одного двигателя проводится по формуле (3.5.4.1)
где - коэффициент использования мощности на экономической скорости полета;
Степень дросселирования двигателя на чрезвычайном режиме работы;
Количество двигателей вертолета;
Степень дросселирования двигателя при полете у земли с экономической скоростью:
3.5.5 Расчет потребной мощности двигательной установки
Для расчета потребной мощности двигательной установки выбирается значение удельной приведенной мощности из условия (3.5.5.1)
Потребная мощность N двигательной установки вертолета будет равна:
где - взлетная масса вертолета;
g = 9.81 м 2 /с - ускорение свободного падения;
3.6 Выбор двигателей
Принимаем два газотурбинных двигателя ГТД-1000Т общей мощностью 2×735,51 кВт. Условие выполняется.
4 Расчет массы топлива
4.1 Расчет крейсерской скорости второго приближения
Принимаем значение крейсерской скорости первого приближения.
Так как рассчитываем коэффициент индукции по формуле (4.1.1):
Определяем удельную мощность, потребную для привода несущего винта в полете на крейсерском режиме по формуле (4.1.2):
где - максимальное значение удельной приведенной мощности двигательной установки,
Коэффициент изменения мощности в зависимости от скорости полета, рассчитываемый по формуле:
Рассчитываем крейсерскую скорость второго приближения:
Определяем относительное отклонение крейсерских скоростей первого и второго приближения:
Так как производим уточнение крейсерской скорости первого приближения, она принимается равной рассчитанной скорости второго приближения. Затем повторяем расчет по формулам (4.1.1) - (4.1.5):
Принимаем.
4.2 Расчет удельного расхода топлива
Удельный расход топлива рассчитываем по формуле (4.2.1):
где - коэффициент изменения удельного расхода топлива в зависимости от режима работы двигателей,
Коэффициент изменения удельного расхода топлива в зависимости от скорости полета, который определяется по формуле (4.2.2):
Удельный расход топлива на взлетном режиме, ;
Коэффициент изменения удельного расхода топлива в зависимости от температуры,
Коэффициент изменения удельного расхода топлива в зависимости от высоты полета, ;
4.3 Расчет массы топлива
Масса топлива затрачиваемого на полет будет равна:
, (4.3.1)
где - удельная мощность, потребляемая на крейсерской скорости;
Крейсерская скорость;
Удельный расход топлива;
L - дальность полета;
5 Определение массы узлов и агрегатов вертолета
5.1 Расчет массы лопастей несущего винта
Масса лопастей несущего винта определяется по формуле (5.1.1):
где R - радиус несущего винта;
s - заполнение несущего винта;
5.2 Расчет массы втулки несущего винта
Масса втулки несущего винта рассчитывается по формуле (5.2.1):
где - весовой коэффициент втулок современных конструкций, ;
Коэффициент влияния числа лопастей на массу втулки, который рассчитывается по формуле (5.2.2):
Центробежная сила, действующая на лопасти, которая рассчитывается ко формуле (5.2.3):
5.3 Расчет массы системы бустерного управления
В систему бустерного управления входят автомат перекоса, гидроусилители, гидросистема управления несущим винтом. Расчет массы системы бустерного управления проводится по формуле (5.3.1):
где b - хорда лопасти;
Весовой коэффициент системы бустерного управления, который можно принять равным 13,2 кг/м 3 ;
5.4 Расчет массы системы ручного управления
Расчет массы системы ручного управления проводится по формуле (5.4.1):
где - весовой коэффициент системы ручного управления, принимаемый для одновинтовых вертолетов равным 25 кг/м;
5.5 Расчет массы главного редуктора
Масса главного редуктора зависит от крутящего момента на валу несущего винта и рассчитывается по формуле (5.5.1):
где - весовой коэффициент, среднее значение которого равно 0,0748 кг/(Нм) 0,8 .
Максимальный крутящий момент на валу несущего винта определяется через приведенную мощность двигательной установки N и частоту вращения винта w:
где - коэффициент использования мощности двигательной установки, значение которого принимается в зависимости от взлетной массы вертолета. Так как, то;
5.6 Расчет массы узлов привода рулевого винта
Рассчитывается тяга рулевого винта:
где - крутящий момент на валу несущего винта;
Расстояние между осями несущего и рулевого винтов.
Расстояние L между осями несущего и рулевого винтов равно сумме их радиусов и зазора d между концами их лопастей:
где - зазор, принимаемый равным 0,15…0,2 м;
Радиус рулевого винта. Так как, то
Мощность, расходуемая на вращение рулевого винта, рассчитывается по формуле (5.6.3):
где - относительный КПД рулевого винта, который можно принять равным 0,6…0,65.
Крутящий момент, передаваемый рулевым валом, равен:
где - частота вращения рулевого вала, которая находится по формуле (5.6.5):
Крутящий момент, передаваемый трансмиссионным валом, при частоте вращения об/мин равен:
Масса m в трансмиссионного вала:
где - весовой коэффициент для трансмиссионного вала, который равен 0,0318 кг/(Нм) 0,67 ;
Масса промежуточного редуктора определяется по формуле (5.6.9):
где - весовой коэффициент для промежуточного редуктора, равный 0,137 кг/(Нм) 0,8 .
Масса хвостового редуктора, вращающего рулевой винт:
где - весовой коэффициент для хвостового редуктора, значение которого равно 0,105 кг/(Нм) 0,8 ;
5.7 Расчет массы и основных размеров рулевого винта
Масса и основные размеры рулевого винта рассчитываются в зависимости от его тяги.
Коэффициент тяги рулевого винта равен:
Заполнение лопастей рулевого винта рассчитывается так же, как для несущего винта:
где - допускаемое значение отношения коэффициента тяги к заполнению рулевого винта,
Длина хорды и относительное удлинение лопастей рулевого винта рассчитывается по формулам (5.7.3) и (5.7.4):
где -число лопастей несущего винта,
Масса лопастей рулевого винта рассчитывается по эмпирической формуле (5.7.5):
Значение центробежной силы, действующей на лопасти рулевого винта и воспринимаемой шарнирами втулки, рассчитывается по формуле (5.7.6):
Масса втулки рулевого винта рассчитывается по такой же формуле, как для несущего винта:
где - центробежная сила, действующая на лопасть рулевого винта;
Весовой коэффициент для втулки, который равен 0,0527 кг/кН 1,35 ;
Весовой коэффициент, зависящий от числа лопастей и рассчитываемый по формуле (5.7.8):
5.8 Расчет массы двигательной установки вертолета
Удельная масса двигательной установки вертолета рассчитывается по эмпирической формуле (5.8.1):
, (5.8.1)
где N - мощность двигательной установки;
Масса двигательной установки будет равна:
5.9 Расчет массы фюзеляжа и оборудования вертолета
Масса фюзеляжа вертолета рассчитывается по формуле (5.9.1):
где - площадь омываемой поверхности фюзеляжа:
Таблица 5.8.1
Взлетная масса первого приближения;
Коэффициент, равный 1,1;
Масса топливной системы:
где - масса затрачиваемого на полет топлива;
Весовой коэффициент, принимаемый для топливной системы равным 0,09;
Масса шасси вертолета равна:
где - весовой коэффициент, зависящий от конструкции шасси. Так как в проектируемом вертолете предусмотрено убираемое шасси, то
Масса электрооборудования вертолета рассчитывается по формуле (5.9.5):
где - расстояние между осями несущего и рулевого винтов;
Число лопастей несущего винта;
R - радиус несущего винта;
Относительное удлинение лопастей несущего винта;
и - весовые коэффициенты для электропроводов и другого электрооборудования,
Масса прочего оборудования вертолета:
где - весовой коэффициент, значение которого равно 1.
5.10 Расчет взлетной массы вертолета второго приближения
Масса пустого вертолета равна сумме масс основных агрегатов:
Взлетная масса вертолета второго приближения:
Определяем относительное отклонение масс первого и второго приближения:
Относительное отклонение масс первого и второго приближения удовлетворяет условию. Это значит, что расчет параметров вертолета выполнен верно.
6 Описание компоновки вертолета
Проектируемый вертолет выполнен по одновинтовой схеме с рулевым винтом, двумя ГТД и полозковым шасси.
Фюзеляж типа полумонокок. Несущие силовые элементы фюзеляжа выполнены из алюминиевых сплавов и имеют антикоррозионное покрытие. Носовая часть фюзеляжа с фонарем кабины пилотов и капоты мотогондолы выполнены из композиционного материала на основе стеклоткани. Кабина пилота имеет две двери, стекла оборудованы противооблединительной системой и стеклоочистителями. Левая и правая двери грузопассажирской кабины и дополнительный люк в задней части фюзеляжа обеспечивают удобство погрузки больных и потерпевших на носилках, а также крупногабаритных грузов. Полозковое шасси выполнено из цельногнутых металлических труб. Рессоры закрыты обтекателями. Хвостовая опора предотвращает касание рулевым винтом посадочной площадки. Лопасти несущего и рулевого винтов выполнены из композиционных материалов на основе стеклоткани и могут быть оснащены противообледенительной системой. Четырехлопастная втулка несущего винта бесшарнирная, выполнена из двух перекрещивающихся стеклопластиковых балок, к каждой из которых крепятся по две лопасти. Двухлопастная втулка рулевого винта с общим горизонтальным шарниром. Топливные баки общей емкостью 850 л расположены в полу фюзеляжа. Система управления вертолетом электродистанционная без механической проводки, имеющая четырехкратное цифровое резервирование и двукратно резервированное независимое электрическое питание. Современное пилотажно-навигационное оборудование обеспечивает полеты в простых и сложных метеоусловиях, а также полеты по правилам ПВП и ППП. Контроль параметров вертолетных систем производится с помощью бортовой информационной системы контроля БИСК-А. Вертолет оборудован системой предупредительной и аварийной сигнализации.
Вертолет может быть укомплектован системой посадки на воду, а также системами пожаротушения и распыления химикатов.
Силовая установка два газотурбинных двигателя ГТД-1000Т общей мощностью 2×735,51 кВт. Двигатели установлены на фюзеляже в отдельных гондолах. Воздухозаборники боковые, снабжены пылезащитными устройствами. Боковые панели гондол откидываются на шарнирах, образуя платформы для обслуживания. Валы двигателей выходят под углом к центральному редуктору и отсеку вспомогательных агрегатов. Выхлопные сопла двигателей отклонены наружу под углом 24". Для защиты от песка установлены фильтры, предотвращающие на 90% проникновение в двигатель частиц, имеющих диаметр более 20 микрон.
Трансмиссия состоит из редукторов двигателей, промежуточных редукторов, угловых редукторов, главного редуктора, вала и редуктора вспомогательной силовой установки, вала и углового редуктора рулевого колеса. В системе трансмиссии используются титановые сплавы.
Электросистема состоит из двух изолированных цепей, одна из которых питается от генератора переменного тока, создающего напряжение 115-120В, а вторая цепь питается от генератора постоянного тока с напряжением 28В. Генераторы приводятся от главного редуктора несущего винта.
Управление дублированное, с жесткой и тросовой проводкой и гидроусилителями, приводимыми от основной и дублирующей гидросистем. Четырехканальный автопилот АП-34Б обеспечивает стабилизацию вертолета в полете по крену, курсу, тангажу и высоте. Основная гидравлическая система обеспечивает питание всех гидроагрегатов, а дублирующая, - только гидроусилителей.
Система отопления и вентиляции обеспечивает подачу подогреваемого или холодного воздуха в кабины экипажа и пассажиров, противообледенительная система защищает от обледенения лопасти несущего и рулевого винтов, передние стекла кабины экипажа и воздухозаборники двигателей.
Связное оборудование включает командные КВ-диапазона - "Юрок", переговорное устройство СПУ-34.
Список литературы
- Проектирование вертолетов/ В.С. Кривцов, Л.И. Лосев, Я.С. Карпов. - Учебник. - Харьков: Нац. аэрокосм. ун-т «Харьк. авиац. ин-т», 2003. - 344с.
- www.wikipedia.ru
- www.airwar.ru
- narod.ru
- http://www.vertolet-media.ru/helicopters/kvz/ansat/
Скачать: У вас нет доступа к скачиванию файлов с нашего сервера.
Введение
Проектирование вертолета представляет собой сложный, развивающийся во времени процесс, разделяющийся на взаимосвязанные проектные стадии и этапы. Создаваемый летательный аппарат должен удовлетворять техническим требованиям и соответствовать технико-экономическим характеристикам, указанным в техническом задании на проектирование. Техническое задание содержит исходное описание вертолета и его летно-технические характеристики, обеспечивающие высокую экономическую эффективность и конкурентоспособность, проектируемой машины, а именно: грузоподъемность, скорость полета, дальность, статический и динамический потолок, ресурс, долговечность и стоимость.
Техническое задание уточняется на стадии предпроектных исследований, в ходе которых выполняются патентный поиск, анализ существующих технических решений, научно-исследовательские и опытно-конструкторские работы. Основной задачей пред проектных исследований является поиск и экспериментальная проверка новых принципов функционирования проектируемого объекта и его элементов.
На стадии эскизного проектирования выбирается аэродинамическая схема, формируется облик вертолета и выполняется расчет основных параметров, обеспечивающих достижение заданных летно-технических характеристик. К таким параметрам относятся: масса вертолета, мощность двигательной установки, размеры несущего и рулевого винтов, масса топлива, масса приборного и специального оборудования. Результаты расчетов используются при разработке компоновочной схемы вертолета и составлении центровочной ведомости для определения положения центра масс.
Конструирование отдельных агрегатов и узлов вертолета с учетом выбранных технических решений выполняется на стадии разработки технического проекта. При этом параметры спроектированных агрегатов должны удовлетворять значениям, соответствующим эскизному проекту. Часть параметров может быть уточнена с целью оптимизации конструкции. При техническом проектировании выполняется аэродинамические прочностные и кинематическиерасчеты узлов, выбор конструкционных материалов и конструктивных схем.
На стадии рабочего проекта выполняется оформление рабочих и сборочных чертежей вертолета, спецификаций, комплектовочных ведомостей и другой технической документации в соответствии с принятыми стандартами
В данной работе представлена методика расчета параметров вертолета на стадии эскизного проектирования, которая используется для выполнения курсового проекта по дисциплине "Проектирование вертолетов".
1. Расчет взлетной массы вертолета первого приближения
где - масса полезного груза, кг;
Масса экипажа, кг.
Дальность полета
2. Расчет параметров несущего винта вертолета
2.1Радиус R , м, несущего винта вертолёта одновинтовой схемы рассчитывается по формуле:
где - взлетная масса вертолета, кг;
g - ускорение свободного падения, равное 9.81 м/с 2 ;
p - удельная нагрузка на площадь, ометаемую несущим винтом,
Значение удельной нагрузки p на ометаемую винтом площадь выбирается по рекомендациям, представленным в работе /1/: где p = 280
Принимаем радиус несущего винта равным R = 7.9
Угловая скорость w , с -1 , вращения несущего винта ограничена величиной окружной скорости w R концов лопастей, которая зависит от взлетной массы вертолета и составили w R = 232 м/с.
2.2 Относительные плотности воздуха на статическом и динамическом потолках
2.3 Расчет экономической скорости у земли и на динамическом потолке
Определяется относительная площадь эквивалентной вредной пластинки:
Где S э = 2.5
Рассчитывается значение экономической скорости у землиV з , км/час:
где I
Рассчитывается значение экономической скорости на динамическом потолкеV дин , км/час:
где I = 1,09…1,10- коэффициент индукции.
2.4Рассчитываются относительные значения максимальной и экономической на динамическом потолкескоростей горизонтального полета:
гдеV max =250 км/час и V дин =182.298 км/час - скорости полета;
w R =232 м/с - окружная скорость лопастей.
2.5Расчет допускаемых отношений коэффицента тяги к заполнению несущего винта для максимальной скорости у земли и для экономической скорости на динамическом потолке:
2.6 Коэффициенты тяги несущего винта у земли и на динамическом потолке:
2.7 Расчет заполнения несущего винта:
Заполнение несущего винта s рассчитывается для случаев полета на максимальной и экономической скоростях:
В качестве расчетной величины заполнения s несущего винта принимается наибольшее значение из s Vmax и s V дин :
Принимаем
Длина хордыb и относительное удлинениеl лопастей несущего винта будет равны:
Где z л -число лопастей несущего винта(z л =3)
2.8 Относительное увеличение тяги несущего винтадля компенсации аэродинамического сопротивления фюзеляжа и горизонтального оперения:
где S ф -площадь горизонтальной проекции фюзеляжа;
S го -площадь горизонтального оперения.
S го =1.5 м 2 .
3. Расчет мощности двигательной установки вертолета.
3.1 Расчет мощности при висении на статическом потолке:
Удельная мощность, потребная для привода несущего винта в режиме висения на статистическом потолке, рассчитывается по формуле:
гдеN H ст - потребная мощность, Вт;
m 0 -взлетная масса, кг;
g -ускорение свободного падения, м/с 2 ;
p -удельная нагрузка на ометаемую несущим винтом площадь, Н/м 2 ;
D ст -относительная плотность воздуха на высоте статического потолка;
h 0 -относительный к.п.д. несущего винта на режиме висения (h 0 =0.75);
Относительное увеличение тяги несущего винта для уравновешивания аэродинамического сопротивления фюзеляжа и горизонтального оперения:
3.2 Расчет удельной мощности в горизонтальном полете на максимальной скорости
Удельная мощность, потребная для привода несущего винта в горизонтальном полете на максимальной скорости, рассчитывается по формуле:
где - окружная скорость концов лопастей;
Относительная эквивалентная вредная пластинка;
I э - коэффициент индукции, определяемый в зависимостиот скорости полета по следующим формулам:
При км/ч,
При км/ч.
3.3 Расчет удельной мощности в полете на динамическом потолке с экономической скоростью
Удельная мощность для привода несущего винта на динамическом потолке равна:
гдеD дин - относительная плотность воздуха на динамическом потолке,
V дин - экономическая скорость вертолета на динамическом потолке,
3.4 Расчет удельной мощности в полете у земли на экономической скорости в случае отказа одного двигателя при взлете
Удельная мощность, необходимая для продолжения взлета с экономической скоростью при отказе одного двигателя рассчитывается по формуле:
где - экономическая скорость у земли,
3.5 Расчет удельных приведенных мощностей для различных случаев полета
3.5.1 Удельная приведенная мощность при висении на статическом потолке равна:
где - удельная дроссельная характеристика, которая зависит от высоты статического потолка H ст и рассчитывается по формуле:
x 0 - коэффициент использования мощности двигательной установки на режиме висения, значение которого зависит от взлетной массы вертолета m 0:
приm 0
при10 25 тонн
приm 0 > 25 тонн
3.5.2 Удельная приведенная мощность в горизонтальном полете на максимальной скорости равна:
где -коэффициент использования мощности на максимальной скорости полета,
Дроссельные характеристики двигателей, зависящие от скорости полетаV max :
3.5.3 Удельная приведенная мощность в полете на динамическом потолке с экономической скоростьюV дин равна:
где - коэффициент использования мощности на экономической скорости полета,
и - степени дросселирования двигателей, зависящие от высоты динамического потолка H и скорости полета V дин в соответствии со следующими дроссельными характеристиками:
3.5.4 Удельная приведенная мощность в полете у земли с экономической скоростью при отказе одного двигателя на взлете равна:
где -коэффициент использования мощности на экономической скорости полета,
Степень дросселирования двигателя на чрезвычайном режиме работы,
n =2 - количество двигателей вертолета.
3.5.5 Расчет потребной мощности двигательной установки
Для расчета потребной мощности двигательной установки выбирается максимальной значение удельной приведенной мощности:
Потребная мощность N двигательной установки вертолета будет равна:
гдеm 01 -взлетная масса вертолета,
g =9.81 м 2 /с-ускорение свободного падения.
3.6 Выбор двигателей
Принимаем два турбовальных двигателя ВК-2500(ТВ3-117ВМА-СБ3)общей мощность каждого N =1,405∙10 6 Вт
Двигатель ВК-2500(ТВ3-117ВМА-СБ3) предназначен для установки на вертолеты новых поколений, а также для замены двигателей на существующих вертолетах для повышения их летно-технических характеристик. Он создан на базе серийного сертифицированного двигателя ТВ3-117ВМА и производитсяна ФГУП «Завод имени В.Я.Климова».
4.Расчет массы топлива
Для расчета массы топлива, обеспечивающей заданную дальность полета, необходимо определить крейсерскую скорость V кр .Расчет крейсерской скорости выполняется методом последовательных приближений в следующей последовательности:
а) принимается значение крейсерской скорости первого приближения:
б) рассчитывается коэффициент индукцииI э :
при км/час
при км/час
в) определяется удельная мощность, потребная для привода несущего винта в полете на крейсерском режиме:
где - максимальное значение удельной приведенной мощности двигательной установки,
Коэффициент изменения мощности в зависимости от скорости полета V кр 1 , рассчитываемый по формуле:
г)Рассчитывается крейсерская скорость второго приближения:
д) Определяется относительное отклонение скоростей первого и второго приближения:
Припроизводится уточнение крейсерской скорости первого приближения V кр 1 , она принимается равной рассчитанной скорости второго приближения. Затем расчет повторяется с пункта б) и заканчивается при условии.
Удельный расход топливарассчитывается по формуле:
где - коэффициент изменения удельного расхода топлива в зависимости от режима работы двигателей,
Коэффициент изменения удельного расхода топлива в зависимости от скорости полета,
Удельный расход топлива на взлетном режиме.
В случае полета на крейсерском режиме принимается:
кг/Вт∙час,
Масса топлива затрачиваемого на полет m т будет равна:
где - удельная мощность, потребляемая на крейсерской скорости,
Крейсерская скорость,
L - дальность полета.
5. Определение массы узлов и агрегатов вертолета.
5.1 Масса лопастей несущего винта определяется по формуле:
гдеR -радиус несущего винта,
s - заполнение несущего винта,
5.2 Масса втулки несущего винта рассчитывается по формуле:
гдеk вт - весовой коэффициент втулок современных конструкций,
k л - коэффициент влияния числа лопастей на массу втулки.
В расчете можно принять:
следовательно, в результате преобразований мы получи:
Для определения массы втулки несущего винта необходимо рассчитать действующую на лопасти центробежную силу N цб (в кН):
5.3 Масса системы бустерного управления, в которую входят автомат перекоса, гидроусилители, гидросистема управления несущим винтом рассчитывается по формуле:
гдеb - хорда лопасти,
k бу - весовой коэффициент системы бустерного управления, который можно принять равным 13,2 кг/м 3 .
5.4 Масса системы ручного управления:
гдеk ру -весовой коэффициент системы ручного управления, принимаемый для одновинтовых вертолетов равным25 кг/м.
5.5 Масса главного редуктора зависит от крутящего момента на валу несущего винта и рассчитывается по формуле:
где k ред - весовой коэффициент, среднее значение которого равно 0,0748 кг/(Нм) 0,8 .
Максимальный крутящий момент на валу несущего винта определяется через приведенную мощность двигательной установки N и частоту вращения винта w :
где x 0 - коэффициент использования мощности двигательной установки, значение которого принимается в зависимости от взлетной массы вертолета m 0:
приm 0
при10 25 тонн
приm 0 > 25 тонн
Масса главного редуктора:
5.6 Для определения массы узлов привода рулевого винта рассчитывается его тягаT рв :
гдеM нв - крутящий момент на валу несущего винта,
L рв - расстояние между осями несущего и рулевого винтов.
Расстояние между осями несущего и рулевого винтов равно сумме их радиусов и зазора d между концами их лопастей:
гдеd - зазор, принимаемый равным 0,15…0,2 м,
Радиус рулевого винта, который в зависимости от взлетной массы вертолета составляет:
Мощность N рв , расходуемая на вращение рулевого винта, рассчитывается по формуле:
где h 0 - относительный КПД рулевого винта, который можно принять равным 0,6…0,65.
Крутящий моментM рв , передаваемый рулевым валом, равен:
где - частота вращения рулевого вала,
Крутящий момент, передаваемый трансмиссионным валом, Н∙м, при частоте вращения n в = 3000 об/минравен:
Масса m в трансмиссионного вала:
где k в - весовой коэффициент для трансмиссионного вала, который равен 0,0318 кг/(Нм) 0,67 .
Масса m пр промежуточного редуктора равна:
где k пр - весовой коэффициент для промежуточного редуктора, равный 0,137 кг/(Нм) 0,8 .
Масса хвостового редуктора, вращающего рулевой винт:
где k хр - весовой коэффициент для хвостового редуктора, значение которого равно 0,105 кг/(Нм) 0,8
5.7 Масса и основные размеры рулевого винта рассчитываются в зависимости от его тяги T рв .
Коэффициент тягиC рв рулевого винта равен:
Заполнение лопастей рулевого винтаs рв рассчитывается так же, как для несущего винта:
где - допускаемое значение отношения коэффициента тяги к заполнению рулевого винта.
Длина хордыb рв и относительное удлинениеl рв лопастей рулевого винта рассчитывается по формулам:
гдеz рв - число лопастей рулевого винта.
Масса лопастей рулевого винта m лр
Значение центробежной силыN цбр ,действующей на лопасти рулевого винта и воспринимаемой шарнирами втулки,
Масса втулки рулевого винтаm втр рассчитывается по такой же формуле, как для несущего винта:
гдеN цб -центробежная сила, действующая на лопасть,
k вт - весовой коэффициент для втулки, принимаемый равным 0,0527 кг/кН 1,35
k z -весовой коэффициент, зависящий от числа лопастей и рассчитываемый по формуле:
5.8 Расчет массы двигательной установки вертолета
Удельная масса двигательной установки вертолетаg дв рассчитывается по эмпирической формуле:
гдеN - мощность двигательной установки.
Масса двигательной установки будет равна:
5.9 Расчет массы фюзеляжа и оборудования вертолета
Масса фюзеляжа вертолета рассчитывается по формуле:
гдеS ом -площадь омываемой поверхности фюзеляжа, которая определяется по формукле:
m 0 - взлетная масса первого приближения,
k ф -коэффициент, равный 1,7.
Масса топливной системы:
гдеm т -масса затрачиваемого на полет топлива,
k тс -весовой коэффициент, принимаемый для топливной системы равным 0,09.
Масса шасси вертолета равна:
гдеk ш -весовой коэффициент, зависящий от конструкции шасси:
Для неубираемого шасси,
Для убираемого шасси.
Масса электрооборудования вертолета рассчитывается по формуле:
гдеL рв - расстояние между осями несущего и рулевого винтов,
z л - число лопастей несущего винта,
R - радиус несущего винта,
l л - относительное удлинение лопастей несущего винта,
k пр иk эл - весовые коэффициенты для электропроводов и другого электрооборудования, значения которых равны:
Масса прочего оборудования вертолета:
гдеk пр -весовой коэффициент, значение которого равно 2.
5.10 Расчет взлетной массы вертолета второго приближения
Масса пустого вертолета равна сумме масс основных агрегатов:
Взлетная масса вертолета второго приближенияm 02 будет равна сумме:
гдеm т - масса топлива,
m гр - масса полезного груза,
m эк - масса экипажа.
6.Описание компоновки вертолета
Проектируемый вертолет выполнен по одновинтовой схеме с рулевым винтом, двумя ГТД и двухопорнымилыжами. Фюзеляж вертолета каркасной конструкции, состоит из носовой и центральной частей, хвостовой и концевой балок. В носовой части размещена двухместная кабина экипажа, состоящего их двух летчиков. Остекление кабины обеспечивает хороший обзор, правый и левый сдвижные блистеры снабжены механизмами аварийного сбрасывания. В центральной части размещена кабина размерами 6.8 х 2.05 х 1.7м, и центральной сдвижной дверью размерами 0.62 х 1.4м с механизмом аварийного сбрасывания. Грузовая кабина рассчитана на перевозку грузов массой до 2т и снабжена откидными сиденьями для 12 пассажиров, а также узлами для крепления 5 носилок. В пассажирском варианте в кабинеразмещены12 кресел, установленных с шагом 0.5м и проходом 0.25м; а в задней части сделан проем под заднюю входную дверь, состоящую из двух створок.
Хвостовая балка клепаной конструкции балочно-стрингерного типа с работающей обшивкой, снабжена узлами для крепления управляемого стабилизатора и хвостовой опоры.
Стабилизатор размером 2.2м и площадью 1.5м 2 с профилем NACA 0012 однолонжеронной конструкции, с набором нервюр и дюралюминиевой и полотняной обшивкой.
Двухопорные, лыжи, передняя опора самоориентирующаяся, размерами500 х 185мм, главные опоры форменного типа с жидкостно-газовыми двухкамерными амортизаторами размерами 865 х 280мм. Хвостовая опора состоит из двух подкосов, амортизатора и опорной пяты; колея лыж 2м, база лыжи3.5м.
Несущий винт с шарнирным креплением лопастей, гидравлическими демпферами и маятниковыми гасителями колебаний, установлен с наклоном вперед 4° 30". Цельнометаллические лопасти состоят из прессованного лонжерона из алюминиевого сплава АВТ-1, упрочненного наклепом стальными шарнирами на вибростенде, хвостового отсека, стального наконечника и законцовки. Лопасти имеют прямоугольную форму в плане с хордой 0.67 м и профилями NACA 230 и геометрической круткой 5%, окружная скорость концов лопастей 200м/с, лопасти снабжены визуальной системой сигнализации о повреждении лонжерона и электротепловым противообледенительным устройством.
Рулевой винт диаметром 1,44м трехлопастный, толкающий, с втулкой карданного типа и цельнометаллическими лопастями прямоугольной формы в плане, с хордой 0.51м и профилем NACA 230M.
Силовая установка состоит из двух турбовальных ГТД со свободной турбиной ВК-2500(ТВ3-117ВМА-СБ3)Санкт-Петербургского НПО им. В.Я.Климова общеймощности каждого N=1405 Вт, установленных сверху фюзеляжа и закрытых общим капотом с открывающимися створками. Двигатель имеет девятиступенчатый осевой компрессор, камеру сгорания кольцевого типа и двухступенчатую турбину.Двигатели снабжены пылезащитными устройствами.
Трансмиссия состоит из главного, промежуточного и хвостового редукторов, валов тормоза, несущего винта. Главный редуктор ВР-8А трехступенчатый, обеспечивает передачу мощности от двигателей, к несущему винту, рулевому винту и вентилятору для охлаждения, маслорадиаторов двигателей и главного редуктора; общая емкость маслосистемы 60кг.
Управление дублированное, с жесткой и тросовой проводкой.и гидроусилителями, приводимыми от основной и дублирующей гидросистем. Четырехканальный автопилот АП-34Б обеспечивает стабилизацию вертолета в полете по крену, курсу, тангажу и высоте. Основная гидравлическая система обеспечивает питание всех гидроагрегатов, а дублирущая, - только гидроусилителей.
Система отопления и вентиляции обеспечивает подачу подогреваемого или холодного воздуха в кабины экипажа и пассажиров, противообледенительная система защищает от обледенения лопасти несущего и рулевого винтов, передние стекла кабины экипажа и воздухозаборники двигателей.
Оборудование для полетов по приборам в сложных метеорологических условиях днем и ночью включает два авиагоризонта, два указателя частоты вращения НВ, комбинированную курсовую систему ГМК-1А, автоматический радиокомпас, радиовысотомер РВ-3.
Связное оборудование включает командные УКВ-радиостанции Р-860 и Р-828, связные КВ-радиостан-ции Р-842 и "Карат", самолетное переговорное устройство СПУ-7.
7. Расчет центровки вертолета
Таблица 1. Центровочная ведомостьпустого вертолета
|
Наименование агрегата |
Масса агрегата, m i , кг |
Координата x i центра масс агрегата, м |
Статический момент агрегата М хi |
Координата y i центра масс агрегата, м |
Статический момент агрегата М yi |
|
1Несущий винт |
|||||
|
1.1 Лопасти |
|||||
|
1.2 Втулка |
|||||
|
2 Система управления |
|||||
|
2.1 Система бустерного управления |
|||||
|
2.2 Система ручного управления |
|||||
|
3 Трансмиссия |
|||||
|
3.1 Главный редуктор |
|||||
|
3.2 Промежуточный редуктор |
|||||
|
3.3 Хвостовой редуктор |
|||||
|
3.4 Трансмиссионный вал |
|||||
|
4 Рулевой винт |
|||||
|
4.1 Лопасти |
|||||
|
4.2 Втулка |
|||||
|
5 Двигательная установка |
|||||
|
6 Топливная система |
|||||
|
7 Фюзеляж |
|||||
|
7.1 Носовая часть (15 %) |
|||||
|
7.2 Средняя часть (50 %) |
|||||
|
7.3 Хвостовая часть (20 %) |
|||||
|
7.4 Крепление редуктора (4 %) |
|||||
|
7.5 Капоты (11 %) |
|||||
|
8.1 Главное (82 %) |
|||||
|
8.2 Переднее (16 %) |
|||||
|
8.3 Хвостовая опора (2 %) |
|||||
|
9 Электрооборудование |
|||||
|
10 Оборудование |
|||||
|
10.1 Приборы в кабине (25%) |
|||||
|
10.2 Радиооборудование (27 %) |
|||||
|
10.3 Гидрооборудование (20 %) |
|||||
|
10.4 Пневмооборудование (6 %) |
|||||
Рассчитываются статические моменты М сх i и М су i относительно координатных осей:
Координаты центра масс всего вертолета рассчитываются по формулам:
Таблица 2. Центровочная ведомость с максимальной нагрузкой
|
Наименование агрегата |
Масса агрегата, m i , кг |
Координата x i центра масс агрегата, м |
Статический момент агрегата М хi |
Координата y i центра масс агрегата, м |
Статический момент агрегата М yi |
|
Вертолет |
|||||
|
Топливные баки 1 и 2 |
|||||
Таблица 3. Центровочная ведомость с 5% остатком топлива и полной коммерческой нагрузкой
|
Наименование агрегата |
Масса агрегата, m i , кг |
Координата x i центра масс агрегата, м |
Статический момент агрегата М хi |
Координата y i центра масс агрегата, м |
Статический момент агрегата М yi |
|
Вертолет |
|||||
Координаты центра масс пустого вертолета: x 0 =-0,003;y 0 =-1,4524;
Координаты центра масс с максимальной нагрузкой: x 0 =0,0293;y 0 =-2,0135;
Координаты центра масс с 5% остатком топлива и полной коммерческой нагрузкой: x 0 =-0,0678;y 0 = -1,7709.
Заключение
В данном курсовом проекте проведены расчеты взлетной массы вертолета, массы его узлов и агрегатов, а также компоновка вертолета. В процессе компоновки уточнили центровку вертолета, расчету которой предшествует составление весовой сводки на основе весовых расчетов агрегатов и силовой установки,ведомостей оборудования, снаряжения, грузов и т.д.Целью проектирования является определениеоптимального сочетания основных параметров вертолета и его систем, обеспечивающих выполнение заданных требований.